0086-551-67295053
0086-551-67295053
 info@bransensor.com
info@bransensor.com
 Mon-Sat: 8:30-18:00
Mon-Sat: 8:30-18:00
 Hefei City, Anhui Province, China
Hefei City, Anhui Province, China





 0086-551-67295053
info@bransensor.com
Mon-Sat: 8:30-18:00
Hefei City, Anhui Province, China
0086-551-67295053
info@bransensor.com
Mon-Sat: 8:30-18:00
Hefei City, Anhui Province, China
 Force Sensor
Force Sensor
 Load Cell
Load Cell
 Torque Force Sensor
Torque Force Sensor
 Multi-axis Force Sensor
Multi-axis Force Sensor
 Piezoelectric Force Sensor
Piezoelectric Force Sensor

A 6-axis force torque sensor mounted to the robot wrist is an easy and affordable way to realize force control with a short implementation time. Especially sensors with integrated electronics are simple to install and can be directly connected to the robot's communication bus or controller. Using a sensor that is robust, compact, and stiff allows for various applications and makes it possible to keep it attached to the robot even while not directly in use.
The usage of a complete 6-axis sensor creates flexibility. Not all axes may be needed at the same time for a specific application. For example, when a robot is polishing a surface, the force perpendicular to the tool and its alignment to the surface is regulated by force control. In the other directions, the robot follows a programmed or recorded position trajectory. Therefore in many applications, a hybrid force/position control is used. Nevertheless, the process forces can be monitored in all directions to avoid manufacturing errors and create a consistent surface finishing quality.


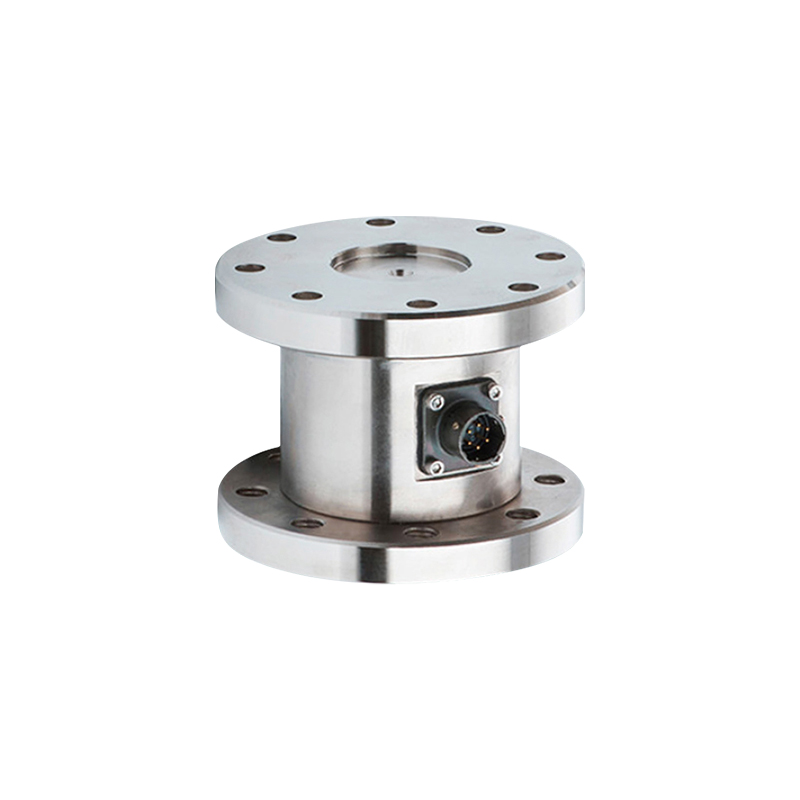
Reaction Torque Sensor With Shaft to Shaft Torque force measurement transducer (BTQ-402)
Read more +
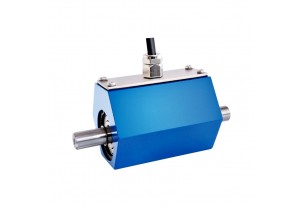
Non-contact Shaft to Shaft Rotary Torque Sensor with Build-in Display to Show Torque, Speed and Power (BTQ-408RTS2)
Read more +
 0086-551-67295053
0086-551-67295053 info@bransensor.com
info@bransensor.com Mon-Sat: 8:30-18:00
Mon-Sat: 8:30-18:00 Hefei City, Anhui Province, China
Hefei City, Anhui Province, China





Copyright © 2018 BRANS Measuring & Controlling Technology Co. Ltd

 Pусский
Pусский  Español
Español 



 ABOUT US
ABOUT US